| Titel: | Umsteuerung mit variabler Expansion; beschrieben von O. Helmholtz. |
| Fundstelle: | Band 163, Jahrgang 1862, Nr. XX., S. 83 |
| Download: | XML |
XX.
Umsteuerung mit variabler Expansion; beschrieben
von O. Helmholtz.
Aus der Zeitschrift des Vereins deutscher
Ingenieure, 1861, Bd. V S. 277.
Mit Abbildungen auf Tab.
II.
Helmholtz, Beschreibung einer Umsteuerung mit variabler
Expansion.
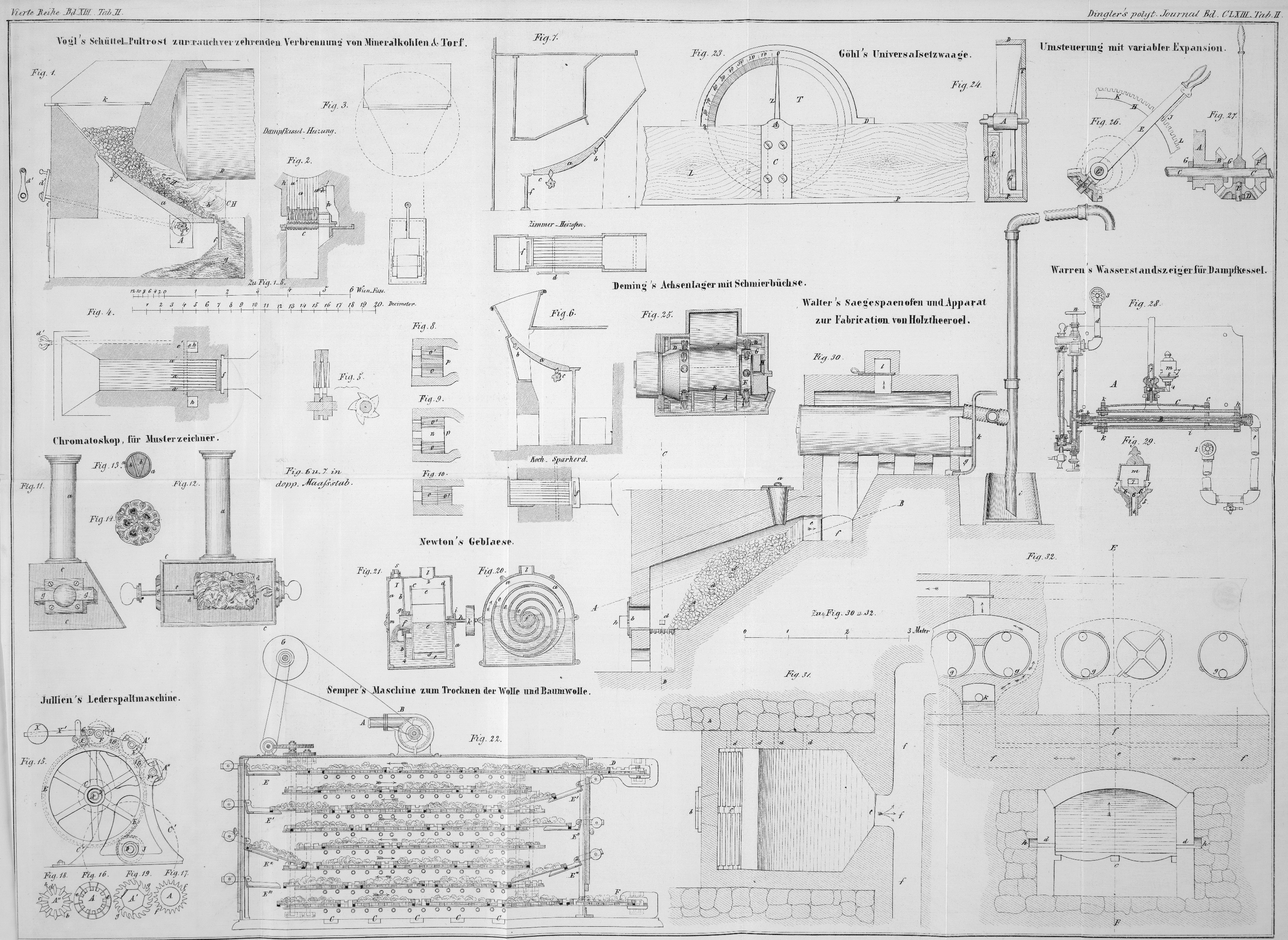
Auf der Industrieausstellung zu Metz sah ich die im Folgenden beschriebene Vorrichtung zur Umsteuerung und gleichzeitig zur Variation des Expansionsgrades; dieselbe ist entweder neu oder doch sehr wenig bekannt, so
daß ich mir erlaube, die Skizzen Fig. 26 und 27 nebst
Beschreibung derselben mitzutheilen.
Diese Vorrichtung ist an einer wunderschön gearbeiteten Fördermaschine von Bertrand Sohn in Paris angebracht, nach Aussage des
dortigen Monteurs von einem preußischen Eisenbahningenieur ursprünglich für
Locomotiven erfunden; den Namen des preußischen Constructeurs konnte ich jedoch
leider nicht erfahren.
Mittelst eines einzigen Excentrics hat man hier Vorwärts- und Rückwärtsgang
sowohl, wie auch variable Expansion. Alles dieß kann während des Ganges der Maschine
durch beliebige Drehung des Excentrics hervorgebracht werden.
A ist das Vertheilungsexcentric; es sitzt lose auf der
Schwungradwelle C, C, ist mit Metall ausgebuchst, mit
dem conischen Rade B aus einem Stücke gegossen, und
rotirt mit diesem stets in dem der Drehungsrichtung der Welle entgegengesetzten
Sinne. Eine Verschiebung in der Längsrichtung der Welle hindern zwei Stellringe G, G, deren einer auch ein Bundring seyn kann.
Seine Bewegung empfängt das mit dem Excentric A aus einem
Stücke gegossene Rad B von dem conischen Rade D, welches beliebig größer oder kleiner seyn kann als
B. Dieses Rad rotirt um einen cylindrischen Ansatz
des Steuerungshebels E; es wird gedreht durch das
conische Rad F, welches fest auf die Schwungradwelle
gekeilt ist. Der Hebel E hat gleichfalls seinen
Drehpunkt in der Schwungradwelle; er läßt sich frei um dieselbe drehen und in seiner
Stellung mittelst des gewöhnlichen Mechanismus und der Zähne K, J, L in dem Gradbogen H fixiren.
Ist der Hebel fixirt, so dreht sich das Excentric, da die Räder B und F gleich groß sind,
nach demselben Gesetze wie die Kurbel, aber in entgegengesetzter Richtung; letzteres
ist für die Bewegung des Schiebersunwesentlich. Dreht man den Steuerungshebel um (90
– δ)°, worin δ den gewünschten Voreilungswinkel bezeichnet, so wird wegen des
Differentialräderwerks das Excentric um 180 – 2δ, also in die Stellung für Rückwärtsgang, gedreht. Wegen des
entgegengesetzten Sinnes der beiden Rotationen machen natürlich Excentricität und
Kurbelrichtung, wenn die Kurbel im todten Punkte steht, stets den Winkel 90 –
δ mit einander, statt wie bei gleicher
Rotation 90 + δ. Die größere Zahl der Zähne bei
K und L gestattet
natürlich die Drehung des Excentrics um einen kleineren Winkel, mithin Variabilität
der Expansion (bei Schiebern mit größerer Deckung), wenn auch letztere auf Kosten
der richtigen Ausströmung des verbrauchten Dampfes. Die mittlere Stellung bei J läßt natürlich, wie ebenso auch die Stephenson'sche Coulisse, Dampf in den Cylinder treten;
nur unterscheidet sie sich von dieser dadurch nicht vortheilhaft, daß sie die Canäle
völlig öffnen läßt, statt nur sehr wenig, wie dieß die Coulisse thut.
Es versteht sich, daß diese Vorrichtung nur für kleinere Maschinen, vielleicht von 10
oder 12 Pferdestärken, anwendbar ist. Bei größeren Maschinen würden weder die
Lagerungen von A, B und D
dauerhaft bleiben, noch auch der Hebel E von der Hand zu
bewegen seyn.
Tafeln